


Gemeinsam genutzte E-Flotten könnten sehr viel kosteneffizienter sein als Fuhrparks exklusiv in Firmenbesitz. Ob sie es tatsächlich werden, entscheidet sich allerdings nicht auf unseren Straßen, sondern auf den Informationshighways der IT-Infrastruktur. Wichtiger als Fahrleistung und Transportfähigkeiten sind in Zukunft die Vernetzung der Fahrzeuge und die Möglichkeit, durch Sensoren Informationen über ihre Position, ihre Umgebung und ihren Zustand verfügbar zu machen.
Überholspur Datenautobahn
In Zukunft werden wir unsere Flotten nicht mehr im Terminkalender planen, sondern in Echtzeit steuern. Informationen und Messwerte aus den Fahrzeugen sind dabei nur die halbe Miete. Eine GPS-Position sagt nicht viel aus ohne eine Karte, die die Umgebung beschreibt, ohne Live-Informationen über Stau-Risiken und Straßenauslastung.
Die Interpretation und Nutzung der erfassten Information durch das IT-System ist dabei der entscheidende Effizienzhebel des Flottenmanagements. Um Daten aus Fahrzeugen richtig verarbeiten zu können, müssen Positionsdaten auf ein Umgebungsmodell abgebildet werden. Dieses Modell beinhaltet sowohl räumliche Informationen, wie das Straßennetzwerk oder die Positionen verfügbarer Ladestationen, als auch zeitliche Informationen, wie zum Beispiel die mögliche Maximalgeschwindigkeit auf dem momentanen Straßensegment. So lässt sich die Distanz zwischen zwei Orten, die geschätzte Fahrtzeit oder der zu erwartende Energieverbrauch berechnen. Eine solche virtuelle Umgebung stellt das räumlich-zeitliche Anfragesystem der LMU (Ludwig-Maximilians-Universität) München für Shared E-Fleet bereit.
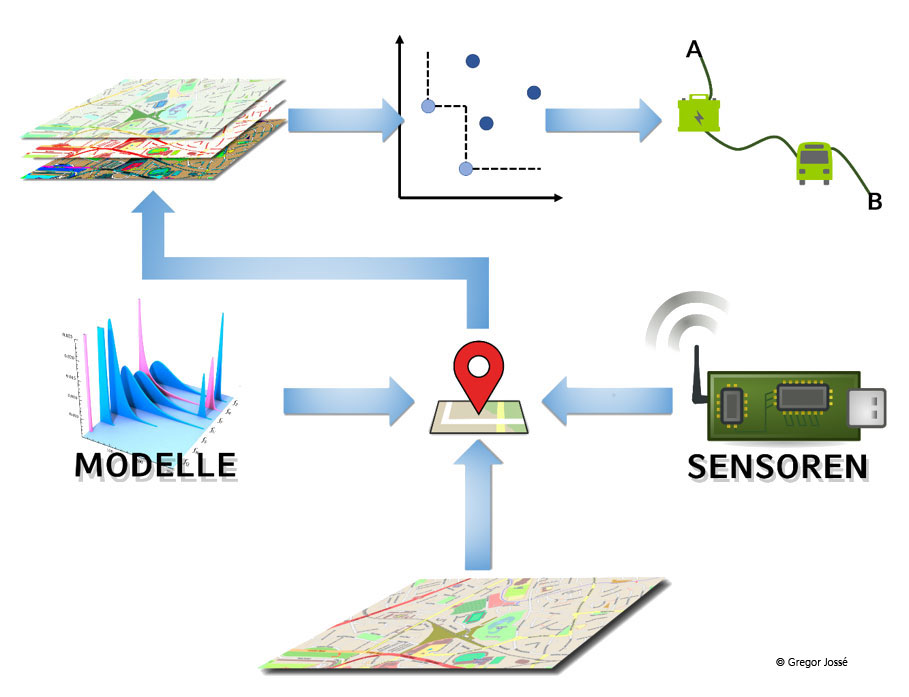
Architektur des räumlich-zeitlichen Anfragesystems, das sich aus statischen sowie dynamischen Informationen speist, um zum Beispiel Routenanfragen unter Berücksichtigung von Echtzeitdaten effizient zu beantworten.
Radar für Verkehr und Flotteneffizienz
Ein allgemeines Beispiel für den Einsatz dieses Monitoring-Systems ist die Frühwarnung bei zeitlichen Verzögerungen. Werden Fahrzeuge nicht rechtzeitig am vereinbarten Ort abgegeben, kann der nächste Nutzer seine Fahrt unter Umständen nicht planmäßig antreten. In diesen Fällen kann der Shared-E-Fleet-Einsatzplaner versuchen, den Plan zu umzuschichten und die Fahrt anders abzuwickeln. So erfährt der Betreiber so früh wie möglich von der anstehenden Verspätung und kann entsprechend reagieren. Das von der LMU entwickelte Monitoring-System erfragt die aktuelle Position des Fahrzeugs und überprüft anschließend, ob der Einsatzplaner informiert werden muss. Das System kann zum Beispiel warnen, wenn es feststellt, dass eine rechtzeitige Ankunft etwa aus zeitlichen Gründen unwahrscheinlich oder wegen zu geringer Restreichweite nicht mehr möglich ist.
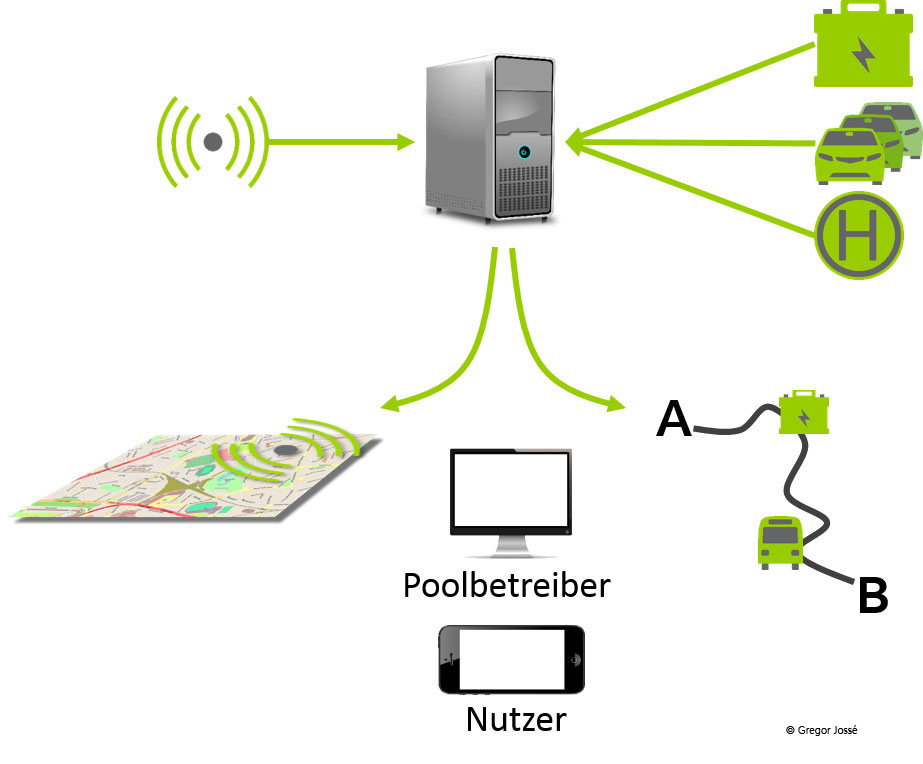
Das Monitoring-System warnt Fleet-Betreiber bei zu erwartenden Abweichungen im Einsatzplan frühzeitig, um zeitnahes Umplanen zu ermöglichen. Dafür bildet das räumlich-zeitliche Anfragesystem Sensordaten auf das Straßennetzwerk ab und berechnet Idealszenarien vor, die laufend mit dem Ist-Zustand verglichen werden.
Der wachsende Einsatz von Elektrofahrzeugen schafft weitere Herausforderungen, die typisch für die E-Mobilität sind. Die derzeit noch limitierte Reichweite, aber auch die verhältnismäßig lange Ladezeit sind technische Limits, die durch effektives digitales Management kompensiert werden können. Während ein Fahrzeug mit Verbrennungsmotor in wenigen Minuten vollgetankt ist und im Notfall auch unterwegs mittels Kraftstoffkanister betankt werden kann, ist die Überschreitung der Restreichweite bei einem Elektrofahrzeug mit einem langwierigen Ladevorgang verbunden. Des Weiteren lassen sich Elektrofahrzeuge beim heutigen Stand der Technik nur an wenigen Ladestationen wieder aufladen. Kurz: Liegenbleiben bedeuten Abschleppen, und das kann teuer werden.
Wie Monitoring das Leben einfacher macht
Selbst wenn man weiß, dass eine Fahrt mit dem Fahrzeug unter normalen Umständen durchführbar ist, sind lange nicht alle Unwägbarkeiten ausgeräumt. Entfernt sich der Fahrer aufgrund von Streckensperrungen, Staus oder Fehler bei der Restreichweitenschätzung von der angedachten Route, genügt die Restreichweite möglicherweise nicht mehr für den Rückweg oder den Weg zur nächsten Ladesäule. Ein Monitoring-System kann frühzeitig erkennen, dass der Einsatzplan gefährdet ist. Dazu wird die aktuelle Position des Fahrzeugs abgefragt und die verbleibende Distanz zum Zielort ermittelt. Ist die berechnete Strecke länger als die Restreichweite, kann der Fahrer gewarnt und eine Route berechnet werden, die ein Zwischenladen des Fahrzeugs an einer Shared-E-Fleet-Ladesäule erlaubt. Sollte dies nicht möglich sein, kann das System auch den Weg zu einer öffentlichen Schnellladesäule berechnen, die den kleinsten Umweg im Hinblick auf die Gesamtroute bedeutet. Falls auch diese Option keine sinnvolle Lösung bietet, bleibt als letzte Möglichkeit der Versuch, eine Route zu einem geeigneten Abstellplatz zu ermitteln, der die Weitereise mit öffentlichen Verkehrsmitteln ermöglicht.
Nutzer werden so – soweit möglich – vor Komplikationen durch die Einschränkungen der Reichweite bewahrt, während der Betreiber durch frühzeitige Warnungen besser auf Abweichungen vom Einsatzplan reagieren kann.

Leselinks:
- Blog-Reihe zur Shared E-Fleet: https://blog.iao.fraunhofer.de/tag/shared-e-fleet/
- Shared E-Fleet Projektwebseite: www.shared-e-fleet.de
- Shared E-Fleet auf Twitter: @SharedEFleet
